Project Description
This is the main documentation for the project in MAS514 at the University of Agder (UiA). In which the goal is to drive a mobile robot autonomously using the ROS 2 robotics framework. The course gives a brief introduction to several topics related to robotics and instrumentation, including motion control, perception, localization and mapping, and motion planning and navigation.
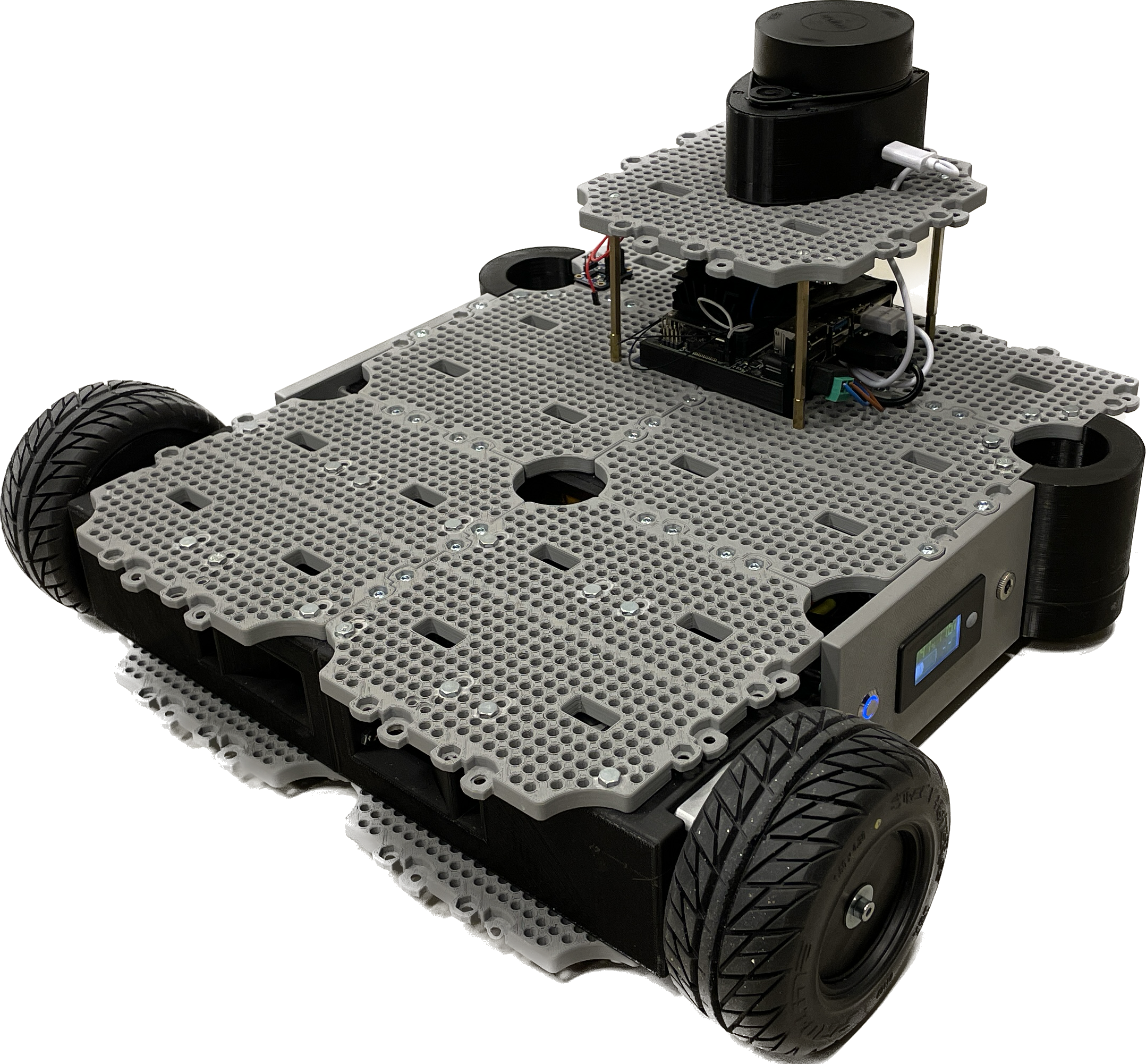
Each group is given a differential drive robot, called UiAbot, inspired by turtlebot. The UiAbot is equipped with sensors such as wheel encoders, a LiDAR, and an IMU. A Jetson Nano with Ubuntu 20.04 is used for sensor data processing and control.
Project by: Martin Mæland, Tarjei Skotterud, and Martin Dahlseng Hermansen
Supervisor: Daniel Hagen
Acknowledgment
Inspired by Turtlebot3, Prof. Dr. Daniel Hagen developed the UiAbot from 2021 to 2022 in collaboration with Mechatronics students. Funding for the necessary equipment and development of this mobile robot platform was generously provided by the Mechatronics Section at the University of Agder.